
")
")
Il rilievo dei tempi di lavoro delle macchine agricole riveste un ruolo fondamentale nella logistica delle operazioni di raccolta, nelle analisi dei costi di esercizio e nei bilanci economici delle colture. I cantieri vengono monitorati dai ricercatori che provvedono, attualmente, sia a rilevare le caratteristiche dei campi, sia a registrare i tempi delle operazioni di raccolta. Tale attività, a causa dell’eccessivo impegno in termini economici e di tempo, non può essere condotta in tutto il periodo di raccolta ma deve essere pianificata ed eseguita su impianti rappresentativi, su superfici di estensione limitata a pochi ettari. La raccolta delle colture energetiche, che si stanno diffondendo velocemente nel nostro paese, non e stata ancora sufficientemente monitorata. Vi e invece la necessita di valutare l'effettiva velocità di raccolta, l'incidenza dei tempi accessori sulla capacita operativa dei cantieri, i tempi di trasferimento del cantiere di raccolta (le colture sono ancora sparse sul territorio) e i costi di manutenzione delle operatrici, che essendo mutuate da altre colture o essendo prototipi, non sono state ancora indagate dal mondo scientifico.
Per questa ragione, il gruppo Panacea ha sviluppato, in collaborazione con la ditta Arvatec srl di Rescaldina (MI), un sistema GPS innovativo, in grado di rilevare automaticamente i tempi di lavoro delle macchine agricole e le caratteristiche cartografiche delle piantagioni raccolte. Attualmente tale sistema e in grado di operare il rilievo dei tempi di raccolta sui singoli campi, ma lo scopo e quello di permettere l’elaborazione dei tempi complessivi della campagna di raccolta della singola coltura energetica. Il sistema si compone di un PC veicolare, con GPS integrato per la guida parallela e software di rilevamento dei tempi, che consente di rilevare e registrare i dati in campo, e di un secondo software per la visualizzazione e l’elaborazione dei suddetti dati. Equipaggiando una macchina operatrice con il nuovo sistema GPS e possibile monitorare il lavoro eseguito dalla macchina nel corso dell’intera annata agraria, ottenendo un quadro completo e reale delle sue prestazioni operative in funzione delle caratteristiche dei campi su cui essa si e trovata ad operare, oltre alla mappatura completa e dettagliata degli impianti oggetto di raccolta.
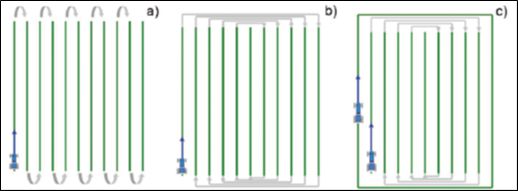
Il sistema GPS e stato testato comparando i dati rilevati manualmente dai ricercatori con quelli rilevati automaticamente durante la raccolta di diversi impianti di pioppo e mais, avvenuta secondo diversi schemi di lavoro:
- raccolta e trinciatura di piantagioni arboree in filari paralleli con compimento di voltate strette (Figura 1a);
- raccolta e trinciatura di piantagioni arboree in filari paralleli con compimento di voltate ampie (Figura 1b);
- raccolta e trinciatura del mais con apertura del perimetro esterno e successivi passaggi paralleli con compimento di voltate ampie (Figura 1c).
Il PC veicolare e stato installato all’interno della cabina di guida e il sistema GPS veniva azionato dallo stesso macchinista della Claas. Al fine di valutare l’accuratezza dei dati registrati e individuare eventuali anomalie nei risultati ottenuti, si e proceduto a monitorare i medesimi cantieri secondo la metodologia tradizionale, impiegando due operatori per i rilievi in campo e un terzo operatore per la registrazione dei tempi di raccolta, quest’ultima avvenuta secondo la metodologia ufficiale della Commission Internationale de l’Organisation Scientifique du Travail en Agriculture (C.I.O.S.T.A.). L’attività svolta in questa prima fase ha permesso di testare il dispositivo in differenti condizioni operative e di individuare e risolvere alcuni errori di classificazione dovuti alla rigidità interpretativa del software. Nel programma sono state inserite delle stringhe di comando che consentono di correggere automaticamente eventuali errori di acquisizione.
L’acquisizione dei dati in campo avviene tramite il sistema “ARVAnav2”, che si compone di un PC veicolare touch screen dotato di GPS integrato per la guida parallela e software per il rilevamento dei tempi. Il PC, alimentato da una presa a 12 V del trattore, viene fissato all’interno della cabina di guida tramite apposito supporto a ventosa. I dati registrati in campo vengono gestiti dal software “ARVACRA”, installato su un secondo computer (laptop o postazione fissa). Tale software permette di elaborare le informazioni visualizzandole sia in forma grafica che tabellare.
 Il sistema ARVAnav2, appositamente sviluppato dalla Azienda Arvatec, per l’utilizzo su macchine agricole, e in grado di guidare le stesse lungo passate parallele, disegnando e memorizzando il lavoro svolto. Tale sistema e stato aggiornato, in una fase successiva, al fine di consentire il
Il sistema ARVAnav2, appositamente sviluppato dalla Azienda Arvatec, per l’utilizzo su macchine agricole, e in grado di guidare le stesse lungo passate parallele, disegnando e memorizzando il lavoro svolto. Tale sistema e stato aggiornato, in una fase successiva, al fine di consentire il
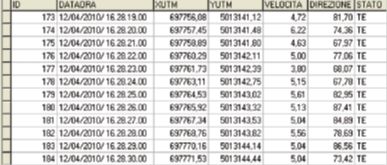
monitoraggio delle operazioni di raccolta delle colture energetiche. Il GPS registra ad intervalli di 1 secondo la posizione della macchina rilevando per ciascun punto le sue coordinate UTM - WGS84, la sua velocità e la sua direzione prevalente. Sulla base dei dati di velocità (m/ sec) e direzione (n° di gradi rispetto al Nord), ad ogni punto viene associato un determinato campo, catalogabile tra tempo effettivo di lavoro (TE), tempo di voltata (TAV) e tempo in cui la macchina e stata ferma (TF).
I punti in cui la velocità di avanzamento e maggiore di zero e la direzione di avanzamento non si discosta, oltre un certo numero di gradi, da quella di riferimento, vengono classificati TE; i punti in cui la velocità di avanzamento e maggiore di zero e la direzione di avanzamento si discosta, oltre un certo numero di gradi, da quella di riferimento, vengono classificati TAV; i punti in cui la velocità di avanzamento e uguale a zero sono classificati TF. L’angolo di voltata può essere definito sia prima di iniziare un lavoro, dal menu impostazioni della schermata iniziale del sistema, sia a lavoro concluso, in fase di elaborazione dei dati. L’operatore è fornito di una apposita scheda sulla quale provvederà a segnare il motivo del tempo di fermata (TF), distinguendo fra TR (tempo di riposo), TMI (tempo morto inevitabile), TAS (tempo accessorio per rifornimento e scarico) e TAC (tempo accessorio per la manutenzione). In quest’ultimo caso l’operatore deve descrivere il tipo di intervento eseguito (pulizia organi, sostituzione cinghia ecc). In caso di TME (tempo morto evitabile), l’operatore mette in pausa il rilevamento. La sommatoria dei tempi sopra descritti definisce, secondo la metodologia C.I.O.S.T.A., il tempo standard di lavoro (TS).
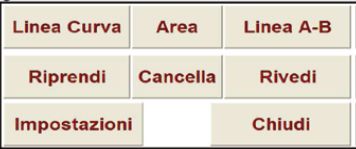 La schermata iniziale che compare sul display del PC consente di gestire le impostazioni, riprendere un lavoro precedentemente sospeso, rivedere il percorso di un lavoro eseguito, calcolare l’area di un appezzamento e avviare il monitoraggio di un cantiere di raccolta secondo due diverse modalità:
La schermata iniziale che compare sul display del PC consente di gestire le impostazioni, riprendere un lavoro precedentemente sospeso, rivedere il percorso di un lavoro eseguito, calcolare l’area di un appezzamento e avviare il monitoraggio di un cantiere di raccolta secondo due diverse modalità:
- Linea A-B, nel caso di passate secondo traiettorie lineari parallele;
- Linea Curva, nel caso di passate secondo traiettorie curve.
Dal menu Impostazioni e possibile impostare i seguenti parametri:
- larghezza di lavoro, variabile in funzione della macchina raccoglitrice utilizzata e della testata equipaggiata;
- lunghezza dell’operatrice, per trasferire il punto di rilevamento dall’antenna alla testata di raccolta;
- tolleranza dell’errore che si vuole mantenere tra le passate;
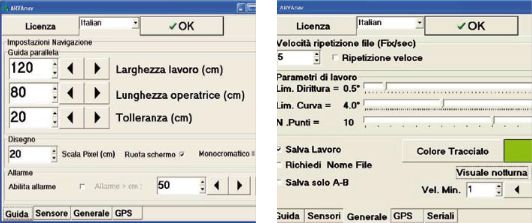
- limite di dirittura, ovvero la tolleranza in gradi oltre la quale il sistema considera il lavoro secondo una traiettoria curva;
- limite di curva, ovvero la tolleranza in gradi oltre la quale il sistema considera il lavoro in svolta. Incrementando quest’ultimo parametro il sistema riconosce l’entrata in svolta più in ritardo ed e meno sensibile agli scostamenti dalla traiettoria lineare.
Il pulsante Area che compare nella schermata iniziale consente di calcolare la superficie di un appezzamento, di qualsiasi forma, a partire dal suo perimetro esterno.
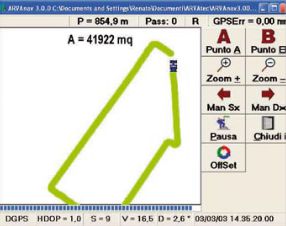 Sul display viene visualizzato in tempo reale il tragitto percorso, il perimetro in metri (P) e l’area in metri quadri (A). La modalità “Linea A-B”, tra le due opzioni disponibili per il monitoraggio dei cantieri di raccolta, e quella che meglio si adatta alle colture energetiche. Questa modalità richiede di definire, per ciascun appezzamento, la direzione prevalente di lavoro fissando, all’inizio e alla fine del primo filare o della prima passata, due punti di riferimento (rispettivamente “Punto A” e “Punto B”). Il sistema, a questo punto, traccia automaticamente
Sul display viene visualizzato in tempo reale il tragitto percorso, il perimetro in metri (P) e l’area in metri quadri (A). La modalità “Linea A-B”, tra le due opzioni disponibili per il monitoraggio dei cantieri di raccolta, e quella che meglio si adatta alle colture energetiche. Questa modalità richiede di definire, per ciascun appezzamento, la direzione prevalente di lavoro fissando, all’inizio e alla fine del primo filare o della prima passata, due punti di riferimento (rispettivamente “Punto A” e “Punto B”). Il sistema, a questo punto, traccia automaticamente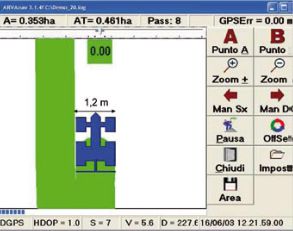
la traiettoria rettilinea e inizia a distinguere le voltate dal tempo effettivo in funzione della direzione di avanzamento. Nel caso in cui la coltura non venga raccolta inizialmente per traiettorie parallele, ma sia necessario effettuare prima uno o più passaggi di apertura perimetrale, i tasti A e B dovranno essere attivati nella prima passata lineare successiva all’apertura del campo. Sul display, oltre ai tasti Punto A e Punto B ci sono i controlli per ingrandire o ridurre le dimensioni del tracciato che si sta percorrendo (Zoom ±), il tasto Area, che consente di salvare in un file di testo l’area totale dell’appezzamento, i tasti Pausa e Chiudi, per interrompere o terminare un lavoro. Quando un lavoro viene interrotto col tasto “Pausa”, lo stesso può essere ripreso in un secondo momento, una freccia direzionale visualizzata sullo schermo del PC guiderà l’operatore verso il punto in cui il lavoro era stato sospeso. Quando, invece, un lavoro viene terminato con il tasto “Chiudi” può essere ripreso in un secondo momento con l’opzione Riprendi, che compare nella schermata iniziale all’avvio del sistema. Questa opzione consente di selezionare e caricare il file di riferimento e continuare le operazioni di raccolta dal punto in cui il lavoro era stato terminato. In quest’ultimo caso sarà necessario raggiungere il punto di interruzione sulla base del tracciato già percorso.
Altre informazioni visualizzate nelle barre superiore e inferiore sono:
- superficie lavorata in ettari (A);
- superficie totale dell’appezzamento in ettari (AT);
- numero delle passate (Pass); errore di traiettoria rispetto alla passata precedente (GpsErr);
- modalità di ricezione del GPS (GPS, DGPS, FLOAT, RTK);
- condizioni dei satelliti (HDOP), più il valore e basso più e precisa la posizione;
- numero di satelliti visibili all’antenna GPS (S);
- velocità di avanzamento in km/orari (V);
- direzione di avanzamento, rispetto al NORD, in gradi (D);
I lavori vengono salvati sulla memoria del PC veicolare e possono essere scaricati, per la successiva elaborazione, singolarmente alla fine di ciascun appezzamento oppure tutti insieme a conclusione della giornata o stagione di raccolta.
Il software “ARVACRA”
I dati registrati in campo dal sistema ARVAnav2 vengono scaricati dal PC veicolare tramite una chiavetta USB e caricati su un secondo PC provvisto del software “ARVACRA 1.0”. La schermata principale del programma consente di caricare i file registrati in campo e gestire le informazioni in essi contenute. Tali informazioni possono essere rappresentate graficamente oppure in forma tabellare. Nella sezione “grafica” viene visualizzato il percorso effettuato dalla operatrice in campo: i punti di colore bianco indicano i settori in cui la macchina ha eseguito la raccolta, i punti di colore giallo i settori in cui la macchina ha eseguito le manovre di svolta e i punti di colore rosso i settori in cui la macchina si trovava ferma. A disposizione dell’utente vi sono diversi strumenti utilizzabili:
- Cambia stato: consente di selezionare uno o più punti modificandone lo stato (TE→TAV, TF→TAV ecc.). Questo strumento e molto utile per correggere eventuali dati anomali o effettuare delle simulazioni;
- Area: consente di misurare la superficie netta raccolta cliccando su quattro o più punti a margine del campo;
- Seleziona punti: consente di selezionare singoli punti o un insieme di punti ricadenti all’interno di una determinata area;
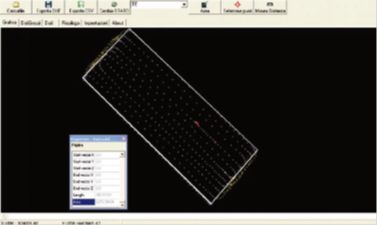
- Misura Distanza: questo strumento consente di misurare la lunghezza delle file, la larghezza dell’impianto, la larghezza delle capezzagne di testa e la distanza tra le file. Per una migliore visualizzazione e una maggiore precisione e possibile attivare, col tasto destro del mouse, i comandi zoom, magnifier e snap;
- Esporta DXF: il file originale (estensione .log) può essere esportato in formato .dxf o .dwg, in modo tale da poter essere visualizzato e gestito anche su piattaforma GIS o Autocad.
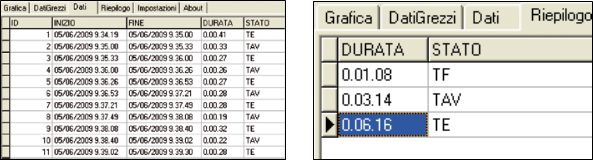
I dati, come precedentemente ricordato, possono essere visualizzati anche in forma tabellare, evidenziando nel Tab “Dati” la cronologia delle diverse fasi di lavoro, e nel Tab “Riepilogo”la sintesi dei tempi registrati nel corso del cantiere di raccolta. Il tool “Esporta CSV” consente di esportate i dati sopra descritti in formato excel ed essere quindi utilizzati per le successive valutazioni operative ed economiche. Nel Tab “Impostazioni”, infine, e possibile modificare l’angolo di riconoscimento della voltata. I dati registrati verranno aggiornati sulla base dei nuovi parametri definiti.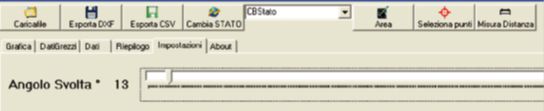
Il sistema di acquisizione dati può essere installato a bordo di qualunque trattore o mezzo agricolo semovente. E possibile lavorare sia in modalità lineare, operando la raccolta per file parallele, come nel caso delle SRF, sia in modalità perimetro, operando prima l’apertura dei margini del campo e procedendo successivamente per file parallele, come avviene generalmente per la raccolta delle colture oleaginose. Il sistema permette di rilevare automaticamente i tempi di lavoro e le caratteristiche cartografiche delle piantagioni interessate dalle operazioni di raccolta. La metodologia proposta, attualmente, consente di mappare con estrema precisione le superfici raccolte definendo il numero di filari, la loro lunghezza, l’interfila, la superficie netta e la forma dell’appezzamento, ma anche di valutare la capacita operativa delle macchine durante l’intera stagione di raccolta, rapportando i risultati ottenuti alla conformazione stessa dei campi e definendo l’incidenza di diversi fattori sull’operatività delle stesse macchine (lunghezza delle file, spazi di manovra, forma dell’appezzamento ecc.).
Sara possibile, quindi, definire dei coefficienti di produttività delle macchine in funzione delle caratteristiche dei campi e prevedere i tempi di raccolta di nuovi impianti che potranno essere realizzati. Il monitoraggio di lungo periodo mette in evidenza anche un aspetto che difficilmente emergerebbe nel corso di prove condotte su superfici di pochi ettari, ovvero l’incidenza dei tempi di manutenzione (dalla sostituzione della cinghia al rifornimento e scarico, agli ingolfamenti) sull’operatività delle macchine. A tal fine l’operatore preposto alla guida del mezzo potrà annotare il tipo di manutenzione risultata necessaria sulla base di un riferimento orario. La durata dell’intervento potrà essere identificata in fase di elaborazione dati. La possibilità di esportare i file registrati in formato .dxf o .dwg, consente la gestione delle informazioni raccolte anche su piattaforma GIS, offrendo la possibilità di ulteriori e interessanti applicazioni scientifiche. E infatti possibile sovrapporre i dati rilevati in campo con immagini satellitari o ortofoto, collocare sul territorio i singoli appezzamenti, creare un database delle caratteristiche degli impianti, sviluppare applicazioni in grado di supportare il tecnico nella gestione delle operazioni di raccolta, dei conferimenti e dei trasporti all’impianto di trasformazione energetica, in funzione della rete stradale disponibile e della posizione della coltura sul territorio.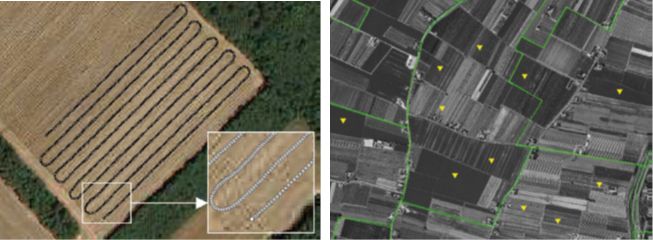
Il nuovo sistema GPS garantisce l’acquisizione di dati estremamente precisi riducendo sensibilmente sia i tempi tecnici necessari al rilievo delle prestazioni delle macchine durante i cantieri di raccolta, sia i tempi tecnici per l’esecuzione dei rilievi in campo. L’innovazione proposta permetterà di condurre un’intensa e capillare attività di monitoraggio delle macchine raccoglitrici operanti su interi comprensori produttivi, fornendo un quadro globale e dettagliato delle caratteristiche delle piantagioni, della loro ubicazione sul territorio, e delle capacita operative delle macchine nelle differenti condizioni operative in cui esse si troveranno ad operare nel lungo periodo. Tale sistema potrà essere impiegato, con l’ausilio di programmi GIS, sia nella pianificazione e nella gestione della cantieristica dedicata alle piantagioni energetiche a servizio delle centrali a biomassa di grossa taglia, sia per definire le componenti del costo globale del cantiere di raccolta (tempi di trasferimento, manutenzione ecc.), al fine di valutare le possibili soluzioni per una sua eventuale contrazione. La ricerca, nei prossimi mesi, sarà orientata verso applicazioni pratiche in campo. Il piano sperimentale prevede, infatti, il monitoraggio delle seguenti macchine:
- falciatrinciacaricatrice Claas Jaguar in raccolta e trinciatura di pioppo e mais, rispettivamente con testata GBE-1 e testata RU 450 XTRA;
- abbattitrice andanatrice di pioppo CRA-ING/ Spapperi, equipaggiata su trattrice;
- falciatrinciacaricatrice semovente Spapperi in raccolta e cippatura di pioppo abbattuto e deposto in andana;
- mietitrebbiatrice in raccolta di colture oleaginose.