
")
")
The biomass necessary for the production of biofuels can derived from several sources, and oilseed crops are prominents. Jatropha curcas L. is a oleaginous crop belonging to the Euphorbiaceae family, native to Central America and part of South America. It grows in tropical and sub tropical regions, with cultivation limits at 30°N and 35°S (fig.1). The suitable average annual temperature range for Jatropha production lies between 20° and 28° C [1].
It is a succulent shrub which grows up to a height of 5 m [1], with deep roots that make it well suited to semi-arid conditions. While jatropha can survive with as little as 250 to 300 mm of annual rainfall, at least 600 mm are needed to flower and set fruit [4]. Jatropha fruits produce 3 oleaginous seeds containing around 34% of oil [5].
The plant is toxic and several species have been used as traditional medicine in many countries. Jatropha oil is used for lamp oil, as well as rural electrification and for the production of soap. In last decade, more and more attention was given to the jatropha because of its properties and use [6] particularly as feedstock for biodiesel production.
Jatropha requires a long period of ripening. Starting from flowering, fruit color turns from green (30-45 days after anthesis), to yellow (mature; 45-60 DAA) and then to brown (ripened; 60-90 DAA), when they dry. Seeds from dried fruits have slightly lower oil content, while green fruit are low in oil [4]. Jatropha seeds build up Free Fatty Acids once they have ripened and lie on the ground. For this reason it is important to harvest the fruits when are at the right ripening.
As stated, unfortunately the ripening does not occur simultaneously and, hence, in a plantation, fruits at different physiological stages are present contemporarily: few bunches at time may be picked.
This is a serious hindrance to a fully mechanized harvest. In semi-arid regions, such as north Africa, the harvest may demand weekly picking and, therefore, be very labor intensive. Finally, the reduced size of fruit coupled to the poor number of seeds inside determine low yield and high transport costs lowering the profitability of the crop. It is clear as the harvest is an important aspect to consider in the entire production chain [7] and needs to be improved, adapting the available approaches to the social and economic context where the plants are grown.
JatroMed is a 4-year demonstration project started on June 2011, involving five countries from the Mediterranean region: Greece (project coordinator), Italy, Egypt, Morocco and Algeria. The project is focused on the cultivation of Jatropha curcas in small-scale, community-based initiatives for local use. The main aim of the project is to make small farmers and rural communities familiar with the cultivation, the potentials and the advantages of Jatropha. For this scope eight Jatropha genotypes were been collected worldwide and planted in demonstration fields. Each genotype will be cultivated in one hectare and treated under different levels of fertilization, irrigation and pruning.
For social and economic reasons, the mechanization of the Jatropha harvest is an important issue to be addressed by this action. Panacea group is in charge to set up the most suitable mechanical system to harvest Jatropha in North Africa by modifying existing implements and testing them in the demonstration fields of partners.
The present work aims at presenting the preliminary results of a field test performed in Morocco with a commercial olive picker modified for the facilitated harvesting of Jatropha fruits. The vibration frequencies generated by the device in action were studied focusing on the resistance to detachment of the fruits and evaluating the risks for human health caused by the vibrations.
Jatropha fruits may be collected using three different systems of harvest: manual, semi-mechanical and completely mechanized.
Since a few years ago, manual harvesting has been considered the only method usable and, certainly, today it remains the most widely employed. Jatropha fruits are harvested mainly by hand or by beating the branches with sticks to knock them to the ground, a system greatly affecting the production costs of Jatropha oil. In a future perspective, looking at Jatropha as energy crop in the North African Regions, such system has to be overtaken, limiting its use to very small-scale plantations.
The facilitated harvesting system represents a good compromise between hand-picking and the completly mechanized harvesting. The method include a large group of devices, with different shapes and functions, usually utilized across the Mediterranean region for harvesting olives or other nuts. The devices cause the fruit drop through the branch's shaking or the fruit's beating. They can be supplied by an electric motor, pneumatic systems, or a gasoline engine.
A step towards a higher level of automation has been done with the use of tree shakers. Basically, these systems are equipped with a grip to apply to the trunk able to produce the required vibration for the selective harvesting of ripe Jatropha fruits.
In medium and large-scale plantations a more efficient harvest system are needed. For Jatropha, this development is taking place and completely mechanized systems were developed, allowing for a substantial expansion of cultivated areas. The main implements designed for harvesting Jatropha are usually based on the use of modified grape or coffee harvesters. They have a horizontal shaker systems equipped with horizontally pivoting arms shaking the canopy or vibrating fingers detaching the bunches and the berries from the bunches. Such machines include system for to limit eventual damages to the plants. The presence of selective device may allow to pick only the ripe fruit, leaving the remainder unripe for a future harvest.
Such conditions may be found only in geographical areas with a well developed agriculture sector. In this case, the mechanical harvesting of Jatropha is expected to provide several benefits:
- Possibility of continuous harvesting
- Reduction of the harvesting costs
- Reduction of labor requirement
- Efficiency and reliability
- Harvest on demand
The improvement of the harvest, whatever the system adopted, will require the integration of different competencies: agronomists, physiologists and breeders, these last aiming at the identification of genes capable of inducing simultaneous ripening.
In the JatroMed project’s guidelines, rational use of technology is recommended, bearing in mind the socio-economic situation of the people living in the target areas. As described previously, the target areas of JatroMed project are sited in three rural regions of Egypt, Algeria, and Marocco characterized by scattered and isolated villages, with no access to electricity and/or potable water. In addition, the farmers have poor technical and management capacities.
Therefore, the financial availability of local farmers is very limited, and large investments for purchasing sophisticated machineries, including their maintenance, would not be affordable in the future. For this reason, complete mechanized harvesting system would not considered appropriate for the purpose of the project due to the cost of the machines, to the small surfaces involved (4 ha in average), and to the socio-economic characteristics of the North Africa Regions' rural communities.
Based on the above considerations, the most suitable harvesting method identified for the target areas North Africa is the semi-mechanical harvesting system. As reported by [7], one worker can pick by hand just over 4 kilos per hour (based on statistics for the olive industry). With a mechanized shaker picker, one worker can pick 635 kilos per hour. The development of mechanical harvesting, it holds a tremendous promise to reduce labor intensity and cost.
To this aim, it was considered that the most appropriate choice were to start from an inexpensive and affordable commercial device, rather than to design a new specific prototype, and then goes through two stages: i) identification of the limits and problems of the device when used in the harvest of Jatropha, bearing in mind the worker health; ii) on the base of first results, to make the opportune modifications. Concerning this issue, it was deemed significant to minimize, in the first stage, the changes on the device, in order to allow the direct use of the devices in the target areas and its employ for the harvester of other local crops like olives, argan or jojoba.
Availability of semi-mechanical harvesting studies of jatropha are actually few, carring out tests is often logistically complicated and the culture itself can show different phenotypical expression in function of the variety, of the soil and of the agronomical techniques adopted.
Experiences and data of recent studies in a selective harvesting of ripe Jatropha fruits, [8] [9], were taken into consideration for the present study.
The study was carried out near Agadir (Morocco), on a three-years old Jatropha field property of a local NGO, the “Fundation du Sud” (www.fondationsud.org) on October 2012. The field area was 6700 m2, with a imprecise layout. Trees of the Mali variety were planted with a distance of 2 m between and along the row, for a final density of 1675 plants ha-1.
Information about the morphological characteristics of the trees were collected. Twenty plants were chosen at random inside the plantation on which the height and the trunk diameter were measured. On each tree, the number of bunches and fruits per bunch were counted. In a sample of five bunches per tree the size, weight and the Fruit Detachment Force (FDF) of every of fruits were registered. The FDF was measured using a digital dynamometer (Sauter FK 100). Finally the ratio between FDF and fruit weight were calculated, being this a powerful index to evaluate the best physiological phase for the harvest.
Between beating and shaking, the latter system assures a high degree of accuracy concerning the selectivity of fruits harvesting. Depending of fruit detachment force at different maturity stages, it is possible to adequately modulate the vibrations intensity for the selective harvesting of ripe fruits.
After a careful analysis of the most practicable alternative among the systems commercially available, the device chosen was an electrical olive picker, modified as a shaker to shake up the branches of Jatropha trees. Such implement presents some positive features:
- manageability and lightness,
- low cost,
- environmental sustainability,
- low maintenance cost,
- ease of use,
- higher harvesting performance compared to hand picking.
 The manageability of the electric machine is due to the properties of the electrical engine itself, since it is easier to modify and represents an affordable system for local people. In fact, the implement can be powered by a car battery (12 Volts), a component easy to find also in rural realities and having a low cost. The starting device was the electric harvesting picker Electri K 1500 (Sbaraglia s.r.l.). The machine, used for olive harvest, is composed by an electric motor generating the oscillation, a bar of aluminum to reach the tree’s branches, an U-shaped rake that bit the branch and by the shaking causes the drop of fruits. The machine is supplied with a switch power plug and 20 m long cable with charging clips, and it is powered by a battery of 50 Ampere and 12 Volt. The tool is really light (2,3 kg – without the battery) and the battery which is the heaviest part can be moved during the harvesting by a trolley.
The manageability of the electric machine is due to the properties of the electrical engine itself, since it is easier to modify and represents an affordable system for local people. In fact, the implement can be powered by a car battery (12 Volts), a component easy to find also in rural realities and having a low cost. The starting device was the electric harvesting picker Electri K 1500 (Sbaraglia s.r.l.). The machine, used for olive harvest, is composed by an electric motor generating the oscillation, a bar of aluminum to reach the tree’s branches, an U-shaped rake that bit the branch and by the shaking causes the drop of fruits. The machine is supplied with a switch power plug and 20 m long cable with charging clips, and it is powered by a battery of 50 Ampere and 12 Volt. The tool is really light (2,3 kg – without the battery) and the battery which is the heaviest part can be moved during the harvesting by a trolley.
 In laboratory, a test was carry out to evaluate the frequencies produced per Volt (V) and the energy adsorptions (conducting a study with accelerometers and microcontroller). Such control was essential to understand what energy flow could ensure the set of frequencies chosen. The limits of the vibration frequencies that do not cause damages to worker health were also identified. In order to adapt it to Jatropha harvesting, minimum modifications were made. Firstly, the rakes have been replaced with a clamp in order to analyze the vibration produced by the electric motor and transmitted to the branch.
In laboratory, a test was carry out to evaluate the frequencies produced per Volt (V) and the energy adsorptions (conducting a study with accelerometers and microcontroller). Such control was essential to understand what energy flow could ensure the set of frequencies chosen. The limits of the vibration frequencies that do not cause damages to worker health were also identified. In order to adapt it to Jatropha harvesting, minimum modifications were made. Firstly, the rakes have been replaced with a clamp in order to analyze the vibration produced by the electric motor and transmitted to the branch.
The picker has a default amplitude of 0,7 cm and a frequency variable from 3 to 20 Hz. Based on the previous considerations about the mechanical intervention on the device, during the study, the default amplitude were used.
Four frequencies (5 – 7 – 9 – 12 Hz) between 5 to 12 Hz (safe worker frequency range) were tested in 20 trees randomly chosen.
The average tree height was 185 cm (st.dev. 21,79 cm) and the average trunk tree diameter was 81,39 cm (st.dev. 29,02 cm). The average diameters at the base and at the fruit level of the branches were, respectively, 11,93 mm (st.dev. 1,97 mm) and 9,91 mm (st.dev. 0,76mm).
The average number of fruit bunches per plant were about 12 (max 27, min 2). The number of fruits per bunch were 3 in average (see table below). Fifty-seven percent of the total fruits on the plant were green fruits (unripe).
The fruit detachment force, FDF, and ratio of FDF to fruit weight (FDF W-1) were measured and resulted negatively correlated with fruit maturity. These results were in line with the ones measured by Hong, (2011), with an average FDF W-1 value for ripe fruit of 1,018 N g-1 and an average FDF W-1 value for unripe fruit of 1,366 N g-1.
Morphologic parameters observed
|
|
Mean |
Min |
Max |
|
|
|
|
|
|
Plant height (m) |
185,0 |
160 |
210 |
|
Trunk diameter (mm) |
81,4 |
31 |
99 |
|
Branch diameter |
|
|
|
|
Distal to the bunch (mm) |
11,9 |
9,45 |
16,14 |
|
Proximal to the bunch (mm) |
9,9 |
8,59 |
11,08 |
|
Bunches per plant (n) |
12,0 |
2 |
27 |
|
Fruits per bunch (n) |
3,0 |
1 |
17 |
Fruit detachment force (FDF) and its ratio with fruit weight
|
|
Fruit |
|||||
|
|
Unripe |
Ripe |
||||
|
|
mean |
max |
min |
mean |
max |
min |
|
FDF (N) |
14,5 |
23,2 |
4,6 |
11,5 |
20,6 |
2,4 |
|
FDF W-1 (N g-1) |
2,54 |
1,17 |
||||
To have a better idea about the magnitude of FDF W-1 ratio of other fruits, [10] report that for olives the FDF W-1 ratio is 49.72 N g-1 to 10.02 N g-1 (muraiolo variety), for almond varies from 20,6 N g-1 to 1,8 N g-1 with a recommended frequency up to 15 Hz (amplitude between 50 to 60 mm). Pistacio FDF W-1 ratio varies from 38,7 N g-1 to 6,8 N g-1 and the best harvesting results is possible to be obtained with a frequency 20 Hz and 50 mm of amplitude [11]. Ripe and unripe Jatropha fruits resulted have a very similar FDF W-1 ratio if compared with fruits of other species. This is makes the harvesting even more complicated considering that the ripening does not occur simultaneously.
The selective fruit harvesting using a semi-mechanical approach is function of two parameters: amplitude and frequency. Recently [8] and [9] conducted two studies aiming at to define the suitable frequencies and amplitudes for the harvesting of ripe (brown) fruits of Jatropha. The studies developed two dedicated prototypes, both employing the vibration of the fruit branches as method for selective harvest. In these works the plant characteristics affecting the fruit detachment (length of fruit stalk, diameter of twig, etc.) were analyzed and then the range of frequencies and amplitudes required to drop down only the ripe fruits have been defined and tested.
The outcomes of these pioneering studies point out different scenarios for the optimization of the efficiency in the semi-automated approach. Adopting an amplitude of 6,43 cm and a frequency of 2,2 Hz, the specific prototype designed by [8] allowed a removal efficiency for yellow, green and brown fruits equal to 68%, 3% and 74% , respectively. Moving to a larger amplitude (7,62 cm) and a higher frequency (5 Hz) they reached over 90% of the harvesting efficiency, but this resulted in severe defoliation and removal of immature fruits. The same unsatisfying results was gained by the prototype of [9] when an amplitude of 2,5 cm and a frequency of 6,5 Hz were applied.
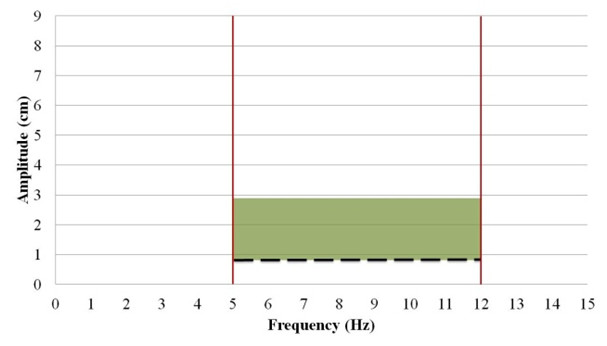 On the picker chosen for the trial at Agadir, the test carried out in laboratory showed that the range of frequencies safe for the worker health varied between 5 and 12 Hz. Following the underlying principle of to minimize the modifications on the device in this first stage, the default amplitude of the device was left unchanged (0,7 cm). Although the frequencies tested were higher than the frequencies adopted in the above described studies, the result obtained was not as the expected one. For this reason it was tried to further increase the frequency during the test also if the vibrations would exceeded the safe limit for worker health. In fact personal protective equipment (gloves and special handle for the device) would have been used to reduce the vibrations in case of the test success. The frequency was increased up to 20 Hz but unfortunately it was not enough to make drop the jatropha fruits.
On the picker chosen for the trial at Agadir, the test carried out in laboratory showed that the range of frequencies safe for the worker health varied between 5 and 12 Hz. Following the underlying principle of to minimize the modifications on the device in this first stage, the default amplitude of the device was left unchanged (0,7 cm). Although the frequencies tested were higher than the frequencies adopted in the above described studies, the result obtained was not as the expected one. For this reason it was tried to further increase the frequency during the test also if the vibrations would exceeded the safe limit for worker health. In fact personal protective equipment (gloves and special handle for the device) would have been used to reduce the vibrations in case of the test success. The frequency was increased up to 20 Hz but unfortunately it was not enough to make drop the jatropha fruits.
With the preliminary test in Morocco it was found out that the fruit detachment force/weight (FDF W-1) ratio of jatropha fruit decreased as maturity time increases. Furthermore, ripe and unripe fruits have similar fruit detachment force/weight ratio.
The amplitude play an important role in harvesting Jatropha, more than the frequency, and it will be necessity to increase it, because the commercial amplitude of the device (0,7 cm) is not enough even though high frequencies are used (20 Hz).
Further research steps will be focused on the analysis how to increase the amplitude with the minimum modification to the device. More test will be carry out trying the harvesting.
[1] J. Heller. Physic nut. Jatropha curcas L. e promoting the conservation and use of underutilized and neglected crops. International Plant Genetic Resources Institute; (1996).
[2] K. Openshaw. A review of Jatropha curcas: an oil plant of unfurled promise. Biomass and Bioenergy 19 (2000) 1-15.
[3] J. Rathbauer, Andrea Sonnleitner, R. Pirot, R. Zeller, D. Bacovsky. Characterisation of Jatropha curcas seeds and oil from Mali. Biomass and Bioenergy. 47 (2012) 201 – 210.
[4] IFAD, FAO. Jatropha: A Smallholder Bioenergy Crop The Potential for Pro-Poor Development - Integrated Crop Management Vol. 8–2010 ISBN 978-92-5-106438-2
[5] W.M.J. Achten, L. Verschot, Y.J. Franken, E. Mathijs , V.P. Singh, R. Aerts, B. Muys. Jatropha bio-diesel production and use. (2008). Biomass and Bioenergy 32:1063-1084.
[6] W. C. Sabandar, A. Norizan, M. J. Faridahanim, I. Sahidin. Medicinal property, phytochemistry and pharmacology of several Jatropha. Phytochemistry. 85 (2013) 7–29 species (Euphorbiaceae): A review
[7] FACT Project, AA.VV. 2010. The Jatropha handbook, from cultivation to application. ISBN 978‐90‐815219‐1‐8.
[8] M. Hong. 2012. Study of a Harvesting Mechanization Method for Jatropha Curcas L. Using Nonlinear Optimization. Proquest, Umi Dissertation Publishing. EAN: 9781249847687.
[9] M R H Ramli, M N A Ghani, M H Razali, F I A Wahab, N Ngah. Determination of vibration properties of Jatropha curcas for mechanical harvesting operations. (2011). Songklanakarin J. Sci. Technol. 34 (1), 9-15.
[10] R Polat, M Guner, E Dursun, D Erdogan, I Gezer, H I Cem Bilim. Mechanical harvesting of Almond with an inertia type limb shaker. (2007). Asian Journal of Plant Sciences. 6(3):528-532.
[11] R Polat, I Gezer, M Guner, E Dursun, D Erdogan, H C Bilim. Mechanical harvesting of pistachio nuts. (2007). Journal of Food Engineering 79:1131–1135.